GTBZ22S Straight Arm օդային օպերացիոն հարթակ





I. Ապրանքի ակնարկներ և առանձնահատկություններ
GTBZ22S Ուղիղ թևը և ինքնագնաց օդային շահագործման պլատֆորմը կարևորում են հիանալի կատարողականությամբ, արդյունավետությամբ, դինամիկայի և հեշտ շահագործման շնորհիվ:Այն առաջատարն է արդյունաբերության մեջ՝ 340 կգ առավելագույն կրող հզորությամբ, շահագործման բարձր բարձրությամբ և ամպլիտուդով, մեծ բեռի կառուցման և շահագործման լայն տարածքի կոստյումով:
[Առավելություններն ու առանձնահատկությունները]
●Երկակի զուգահեռ կապը և հեռադիտակային թեւը կարող են գիտակցել մեքենայի ծանրության կենտրոնի դինամիկ կարգավորումը՝ ամբողջական մեքենան դարձնելով ավելի կայուն:
●4WD, արտաճանապարհային լայն անվադողերով և առանցքի հավասարակշռության համակարգով, մեքենան գերազանց է վարելու և ճանապարհին հարմարվելու համար:
●Բազմաբեռ ծրարների կառավարման տեխնոլոգիաները կարող են իրական ժամանակում վերահսկել բեռը, արդյունավետորեն օգտվելով բումից և դարձնելով դրա աշխատանքի արդյունավետությունը առաջատար եզրին:
●Ավտոբալանսի երկարացման մեխանիզմը բարելավում է երկարացման մեխանիզմի անվտանգությունը և երկարացնում է պողպատե պարանի ծառայության ժամկետը:
●Էլեկտրական կառավարման համակարգը ընդունում է բաշխված կառավարման տեխնոլոգիաները՝ հիմնված PLC-ի և CAN-ի վրա՝ իրականացնելով ավտոմատ հարթեցում, հարթակի ծանրաբեռնվածության կշռում, դինամիկ մոնիտորինգ և անսարքության նախազգուշացում:
II.Հիմնական մասերի ներածություն
1. Շասսիի մաս
Հիմնական կոնֆիգուրացիաները՝ 2WD, չորս անիվի ղեկ, առանցքի հավասարակշռություն և պերֆուզիոն փրփուր անվադողեր:
(1) Վարելու առավելագույն արագությունը 6 կմ/ժամ:
(2) Առավելագույն գնահատելիությունը 45%-Max.մակարդակը արդյունաբերության մեջ
(3) առանցքի հավասարակշռության համակարգ. զգալիորեն բարելավում է մեքենայի ցանկացած կոշտ ճանապարհով անցնելու ունակությունը:
(4) Ներկառուցված շրջող ռեդուկտորը, որը միավորում է շարժիչը և ռեդուկտորը, կիրառվում է, և ապահովվում է վարման երկու արագություն (բարձր արագություն և ցածր արագություն)՝ տարբեր միջավայրերում մեքենայի վարման պահանջները բավարարելու համար:Ճանապարհորդող մեխանիզմն ունի ինքնաարգելակման գործառույթ՝ լանջերով ճանապարհորդելիս և հագեցած է կցորդիչ սարքով՝ անսարքության դեպքում քարշակը հեշտացնելու համար:
2. Բում մաս
(1) Մեկ հեռադիտակային մխոցի 3 հատվածանոց հեռադիտակային բում + մետաղական պարան:
(2) Բումի նյութ - Բումը եռակցված է բարձր ամրության պողպատից՝ թեթև և բարձր անվտանգությունն ապահովելու համար:
(3) Ուղղաձիգ + բում, որը միաժամանակ բարձրանում և բարձրանում է, այն ավելի արդյունավետ դարձնելով:
(3) Ուժի և կոշտության համընկնում - Այն երաշխավորում է բումի ակնառու ուժն ու կոշտությունը:
3. Պտտվող սեղանի մաս
(1) Պտտվող սեղանն ի վիճակի է 360° շարունակական պտտման և ապահովված է երկու անցքով՝ տրանսպորտային կողպեքի կապում տեղադրելու համար:
(2) Էլեկտրաէներգիայի համակարգ - Perkins/Deutz շարժիչները հագեցած են հարվածների կլանման և ջերմության ցրման օպտիմալացված համակարգով:
(3) Շարժիչի պտտվող մոնտաժը ամրացված է մեքենայի շրջանակին և կարող է դուրս պտտվել, ինչը հեշտացնում է շարժիչին և դրա կցորդներին մուտքը սպասարկման և վերանորոգման համար:
4. Հարթակի մաս
(1) 2,4մ×0,9մ մեծ աշխատանքային հարթակ:
(2) 160° պտտվող հարթակ:
(3) Մինչև 340 կգ կրող հզորություն:
(4) Էլեկտրահիդրավլիկ համամասնական ավտոմատ հարթեցման համակարգը կարող է իրական ժամանակում վերահսկել հարթակի անկյունը՝ դինամիկ կերպով հարթեցնելով այն:
5. Հիդրավլիկ համակարգ
(1) Փակ պոմպ + փոփոխական պոմպ. առաջինը օգտագործվում է գործող համակարգը կառավարելու համար, իսկ երկրորդը կառավարում է ուղղակիորեն շարժիչով շարժվող ամբողջական հիդրավլիկ համակարգը, բացառությամբ գործող համակարգի.
(2) Տեղադրված վթարային էներգաբլոկ - Այն կարող է ապահովել, որ շարժիչի կամ նավթի պոմպի անսարքության դեպքում բումը կարող է հետ քաշվել մինչև շարժիչի կարգավիճակը:
(3) Գերկառուցվածքի հիդրավլիկ համակարգը փոփոխական պոմպային մշտական ճնշման համակարգից է. հիմնվելով էլեկտրա-հիդրավլիկ համամասնական կառավարման տեխնոլոգիաների վրա, մեքենան կարող է կատարել վերնաշենքի պտտում, բումի փռում, բումի հետ քաշում/երկարացում, աշխատանքի ճոճում: հարթակ;վերնաշենքի հիմնական փականը միացնող փականից է.մեքենան տեղադրված է հիդրավլիկ յուղի ռադիատորով։
(4) Աշխատող համակարգը փակ փոփոխական համակարգ է՝ 4×4 շարժիչ տիպ, դասակարգված է բարձր արագությամբ և ցածր արագությամբ շարժակների:Ներքաշային հիդրավլիկ համակարգը կարող էր կատարել առանցքի հավասարակշռումը և ղեկային գործառույթները:
5. Էլեկտրական համակարգ
(1) PLC կառավարման տեխնոլոգիա - պտտվող սեղանի և հարթակի համար տրամադրվում է մեկ կարգավորիչ:Շասսիի պտտվող սեղանի և պլատֆորմի համար տեղադրվում է կառավարման տուփ՝ համապատասխանաբար շասսիի, պտտվող սեղանի, բումի և հարթակի համար:
(2) Հիմնական կառավարման տարրեր - Շարժիչի նախնական տաքացում, մեկնարկ, բոցավառում և արագության կառավարում;Շարժիչի յուղի ճնշում, հովացուցիչ նյութի ջերմաստիճանի ստուգում և նախազգուշացում;Շասսիի ղեկ և կառավարում;Պտտվող սեղանի պտտվող և բումի լաֆֆինգ և հեռադիտակի կառավարում;Պլատֆորմի պտտման հսկողություն;Պլատֆորմի բեռի ստուգում;Պլատֆորմի հարթեցում.
(3) Անվտանգության պաշտպանության բազմաթիվ մեթոդներ՝ շարժիչի մոնիտորինգ և պաշտպանիչի գործարկում;մեքենա - թեքման նախազգուշացում;գերբեռնվածության նախազգուշացում;պողպատե մետաղալարերի թուլության մոնիտորինգ:
III.GTBZ22S-ի հիմնական մասերի կոնֆիգուրացիա
| S/N | Անուն | Քանակ | Նշում |
| Շարժիչ | 1 | Պերկինս/Յուչայ | |
| Ճանապարհորդող ռեդուկտոր | 4 | OMNI/RR | |
| Ճանապարհորդող շարժիչ | 4 | DAFOSS / Shengbang | |
| Փակ պոմպ | 1 | REXROTH/Liyuan | |
| Էներգաբլոկ | 1 | ԲՈՒՉԵՐ | |
| Պլատֆորմի փականների խումբ | 1 | Sant/Shengbang | |
| Պտտվող փականների խումբ | 1 | ||
| Ճանապարհորդող հսկիչ փականների խումբ | 1 | ||
| Ճոճվող գլան | 1 | HELAC/Weihai Liansheng | |
| Կռունկ թեւի գլան | 1 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| Համահարթեցման գլան | 1 | ||
| Շեղող գլան | 1 | ||
| Հեռադիտակային գլան | 1 | ||
| Ղեկի գլան | 2 | ||
| Հաշվեկշռային մխոց | 2 | ||
| Հիդրավլիկ յուղի ռադիատոր | 1 | Յինլուն | |
| Վերահսկիչ | 2 | XCMG | |
| Պտտվող թեքության սենսոր | 1 | Shanghai Parker Hannifin | |
| Պլատֆորմի թեքության սենսոր | 1 | Սյուչժոու Յուել | |
| Կշռման սենսոր | 1 | ||
| Ջոյսթիկ | 2 | ԴԱՖՈՍ | |
| Ոտքի անջատիչ | 1 | ԱՐԵՎՆԵՐ | |
| Պտտվող առանցքակալ | 1 | Մաանշան Ֆանգյուան | |
| Շեղման ռեդուկտոր | 1 | Սյուչժոու Քեյուան | |
| Ճոճվող շարժիչ | 1 | Նինբո Չժոնգի | |
| Անվադող | 4 | Լայչժոու Յիշիմայ |
IV.GTBZ22S-ի հիմնական տեխնիկական բնութագրերը
| Նյութ | Միավոր | Պարամետր |
| ա.Ամբողջական մեքենայի ընդհանուր երկարությունը | mm | 10150 թ |
| բ.Ամբողջական մեքենայի ընդհանուր լայնությունը | mm | 2490 թ |
| գ.Ընդհանուր բարձրություն | mm | 2800 թ |
| դ.Անիվային բազա | mm | 2500 թ |
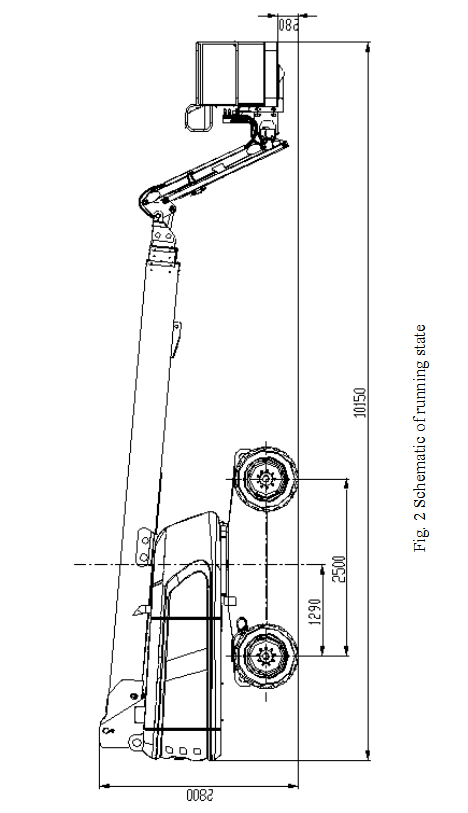
| Աշխատանքային առավելագույն բարձրությունը | m | 24 |
| Հարթակի առավելագույն բարձրությունը | m | 22 |
| Աշխատանքային առավելագույն տիրույթ | m | 18.3 |
| Առավելագույն կրող քաշը | kg | 230 (Առանց սահմանափակման)/340 (Սահմանափակով) |
| Լաֆֆինգի բումի տիրույթ | ° | -5 ~ +75 |
| Պտտվող սեղանի թեքման անկյունը | ° | 360 թ |
| Հետևի առավելագույն թեքություն | mm | 1550 թ |
| Պլատֆորմի չափը | mm | 2400×900 |
| Պլատֆորմի թեքման անկյունը | ° | 160 |
| Ընդհանուր քաշը | kg | 12500 թ |
| Ճանապարհորդության առավելագույն արագություն | կմ/ժ | 6 |
| Շրջադարձի նվազագույն շառավիղը | m | 6 |
| Գետնից նվազագույն մաքրություն | mm | 230 |
| Առավելագույն գնահատելիություն | % | 45 |
| Անվադողի բնութագրում | - | 355/55D625 |
| Շարժիչի մոդել | - | Perkins 404D-22TYuchai 4D24T00 |
| Շարժիչի գնահատված հզորությունը | կՎտ/(r/min) | 43/(2600)48/(2700) |
V. Մեքենայի անվտանգ աշխատանքային տիրույթի դիագրամ
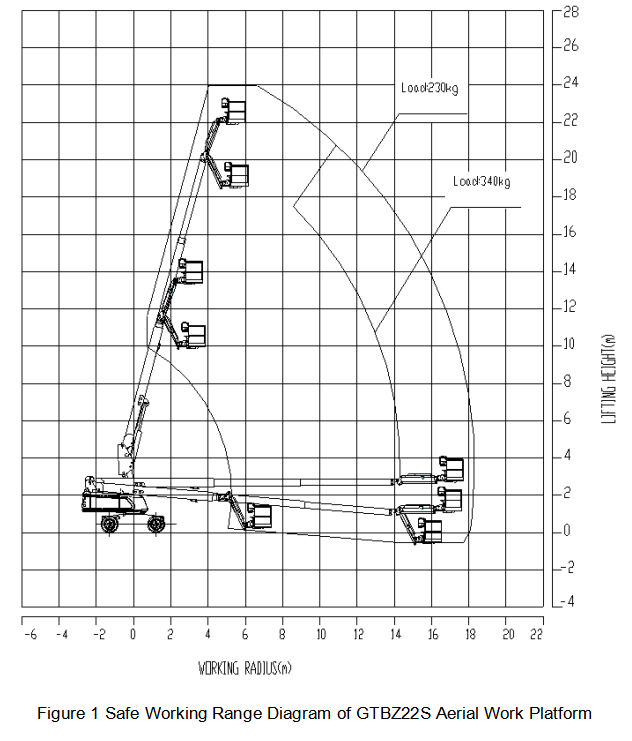
VI.Մեքենայի չափերի դիագրամ՝ վարման կարգավիճակում