GTBZ14JD Electrical Crank Arm Aerial Operation Platform





I. Ապրանքի ակնարկներ և առանձնահատկություններ
Էլեկտրական կռունկով օդային աշխատանքային պլատֆորմները մշակվել են XCMG-ի կողմից, կոմպակտ կառուցվածքներ և 1,75 մ լայնությամբ մեքենայի թափք:Խելացի և կատարյալ կառավարման համակարգն առանձնանում է մարդկայնացված դասավորությամբ, առանց սպասարկման դիզայնի և հեշտ օգտագործման ու սպասարկման՝ ապահովելով բազմաթիվ տարբերակներ և համապարփակ անվտանգություն:
[Առավելություններն ու առանձնահատկությունները]
●Σ-ձևավորված բումի կոմբինատը և զրոյական դրեյֆ դիզայնը դարձնում են այն ավելի արդյունավետ:
●3,15 մ շրջադարձի փոքր շառավիղը թույլ է տալիս մեքենային աշխատել նեղ տարածքում:
●48V և 420Ah մեծ հզորությամբ մարտկոցը երկարացնում է նավարկության հնարավորությունը:
●Ընդլայնված AC շարժիչի գործարկման տեխնոլոգիաներ;ղեկի դիֆերենցիալ կառավարման տեխնոլոգիաներ;հզոր և կայուն գործողություններ;գնահատելիությունը մինչև 30%
●DC պոմպի և համամասնական կառավարման տեխնոլոգիաները էներգախնայող և արդյունավետ են՝ աշխատանքը դարձնելով ավելի կայուն և անվտանգ:
●Բնապահպանական, զրոյական արտանետումներ, ցածր աղմուկ, անհետք ճանապարհորդություն, հարմար է փակ շինարարության համար:
II.Հիմնական մասերի ներածություն
1. Շասսիի մաս
Հիմնական կոնֆիգուրացիաներ;2WD, երկանիվ ղեկ, պինդ անվադողեր.
(1) Վարելու առավելագույն արագությունը 5.2կմ/ժ.
(2) Առավելագույն գնահատելիությունը 30% է:
(3) Կիրառվում է ներկառուցված շրջող ռեդուկտորը, որը միավորում է շարժիչն ու ռեդուկտորը, և տրամադրվում է վարման երկու արագություն (բարձր արագություն և ցածր արագություն)՝ տարբեր միջավայրերում մեքենայի վարման պահանջները բավարարելու համար:Ճանապարհորդող մեխանիզմն ունի ինքնաարգելակման գործառույթ՝ լանջերով ճանապարհորդելիս և հագեցած է կցորդիչ սարքով՝ անսարքության դեպքում քարշակը հեշտացնելու համար:
|
2. Բում մաս
(1) ծալովի թեւ + հեռադիտակային թեւ + կռունկ
(2) Բումի նյութ - Բումը եռակցված է բարձր ամրության պողպատից՝ թեթև և բարձր անվտանգությունն ապահովելու համար:
(3) Ծալովի թեւը բաղկացած է զուգահեռագծային կառուցվածքների երկու հավաքածուից, որոնց միջև կապում է կապը, և կարող է միաժամանակ շարժվել գլանաձև մխոցի օգնությամբ՝ դարձնելով աշխատանքը ավելի արդյունավետ:
4) Հեռադիտակային թևերի երկու հատված, որոնք ունեն մեկ գլան աստղադիտակային տիպ.կռունկի թեւերը զուգահեռագիծ են
3. Պտտվող սեղանի մաս
(1) 355° անխափան շրջադարձ և երկու մոնտաժային անցք՝ կողպեքի կապում փոխանցելու համար.
(2) Պտտվող սեղանը կազմված է մեկ թիթեղից՝ ամրապնդող կողով.ծխնիների կետերը բարձր դրված են, և հակակշիռը տեղադրված է պտտվող սեղանի հետևի մասում.
4. Հարթակի մաս
(1) 1,4մ×0,7մ մեծ աշխատանքային հարթակ:
(2) 160° պտտվող հարթակ:
(3) Մինչև 227 կգ կրող հզորություն:
(4) Էլեկտրահիդրավլիկ համամասնական ավտոմատ հարթեցման համակարգ.
5. Հիդրավլիկ համակարգ
(1) Հիդրավլիկ մասեր - Հիմնական մասերը, ներառյալ հիդրավլիկ պոմպը և հիմնական փականը, ընդունում են միջազգային հայտնի ապրանքանիշի արտադրանքը:
(2) Հիդրավլիկ համակարգը շարժվում է մարտկոցի պոմպով.փոխանցման պոմպը ուղղակիորեն շարժվում է շարժիչով:
(3) Վերնաշենքի հիդրավլիկ համակարգը հաստատուն հոսքի փոխանցման պոմպային համակարգից է. հիմնվելով էլեկտրա-հիդրավլիկ համամասնական կառավարման տեխնոլոգիաների վրա, մեքենան կարող է կատարել վերնաշենքի պտտում, բումի փռում, բումի հետ քաշում/երկարացում, աշխատանքի ճոճում: հարթակ;վերնաշենքի հիմնական փականը էլեկտրական-հիդրավլիկ համամասնական փականից է։
(4) Տեղադրված վթարային էներգաբլոկ - Այն կարող է ապահովել, որ շարժիչի կամ նավթի պոմպի անսարքության դեպքում բումը կարող է հետ քաշվել շարժիչի կարգավիճակին:
6. Էլեկտրական համակարգ
(1) PLC կառավարման տեխնոլոգիա - պտտվող սեղանի և հարթակի համար տրամադրվում է մեկ կարգավորիչ:Շասսիի պտտվող սեղանի և պլատֆորմի համար տեղադրվում է կառավարման տուփ՝ համապատասխանաբար շասսիի, պտտվող սեղանի, բումի և հարթակի համար:
(2) Հիմնական կառավարման տարրեր - շասսիի ղեկ և ճանապարհորդական կառավարում.պտտվող սեղանի պտտում;բում հեռադիտակ;լաֆինգի հսկողություն;հարթակի ճեղքումը
(3) Անվտանգության պաշտպանության բազմաթիվ մեթոդներ - շարժիչի շարժիչի մոնիտորինգ;պաշտպանություն շարժիչի գերբեռնվածությունից;մեքենայի թեքման նախազգուշացում;գերբեռնվածության նախազգուշացում;սահմանափակ արագությամբ վազք;արտակարգ անկում;
III.GTBZ14JD հիմնական մասերի կոնֆիգուրացիա
| S/N | Անուն | Քանակ | Նշում |
| Մարտկոց | 8 | Տրոյան | |
| Լիցքավորիչ | 1 | Դոնգուան Լոնգշենգ | |
| Շարժիչային շարժիչ | 2 | ԿՈՒՐՏԻՍ | |
| Ճանապարհորդող ռեդուկտոր | 2 | Omni | |
| Աշխատող AC շարժիչ | 2 | KDS | |
| Հիմնական մարտկոցի պոմպ | 1 | ԲՈՒՉԵՐ | |
| Օժանդակ մարտկոցի պոմպ | 1 | ԲՈՒՉԵՐ | |
| Հիմնական պոմպ | 1 | Սանտ | |
| Ճոճվող գլան | 1 | ԱՄՆ HELAC | |
| Համահարթեցման գլան | 2 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| Թիվ 1 թեւի լաֆֆինգ գլան | 2 | ||
| Թիվ 2 թեւի լաֆֆինգ գլան | 1 | ||
| Կռունկ թեւի գլան | 1 | ||
| Հեռադիտակային գլան | 1 | ||
| Ղեկի գլան | 1 | ||
| Հավասարակշռության փական | 5 | Sant/EATON | |
| Վերահսկիչ | 2 | Հիրշման | |
| Կրկնակի լիսեռ թեքության սենսոր | 1 | Փարքեր | |
| Ցուցադրել | 1 | Xuzhou Hirschmann Electronic Co., Ltd. | |
| Ջոյսթիկ | 2 | Դանֆոսս | |
| Ոտքի անջատիչ | 1 | ԱՐԵՎՆԵՐ | |
| Շարժում և քշում | 1 | Հուաֆանգ | |
| Ճոճվող շարժիչ | 1 | Սպիտակ | |
| Անվադողեր | 4 | Լայչժոու Յիշիմայ |
IV.GTBZ14JD-ի հիմնական տեխնիկական պարամետրերի աղյուսակ
| Նյութ | Պարամետր |
| Գործող վիճակի պարամետրերը | |
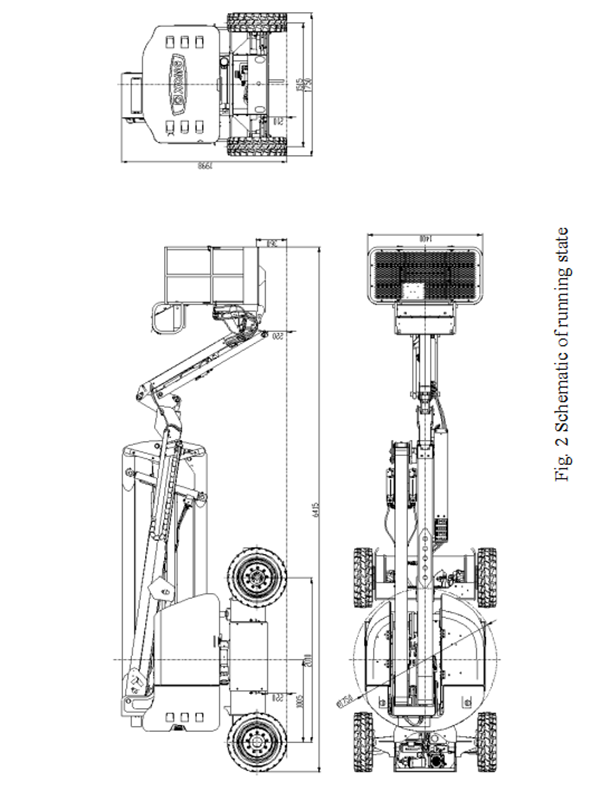
| Ընդհանուր չափսեր (L × W × H) | 6,42×1,75×2 մ |
| Աշխատանքային հարթակի ընդհանուր չափերը | 1,4×0,7×1,15 մ |
| Առավելագույն արագություն | 5,2 կմ/ժ |
| Առավելագույն գնահատելիություն | ≥30% |
| Min.արտաքին շրջադարձի շառավիղը | ≤3,15 մ |
| Մաքրություն/մ (կենտրոն) | 0,21 մ |
| Անիվային բազա | 2 մ |
| Ընդհանուր զանգված | 6500 կգ |
| Գործողության հիմնական պարամետրերը | |
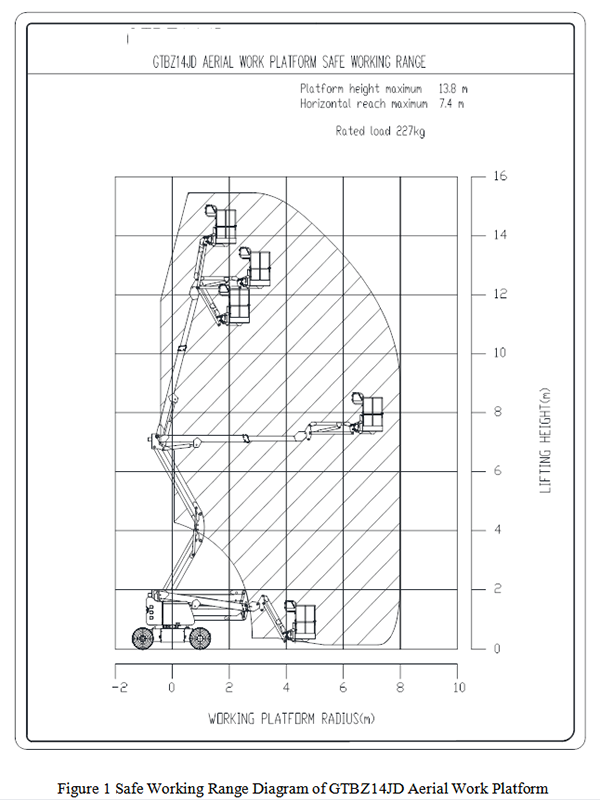
| Գնահատված աշխատանքային բարձրությունը | 15,5 մ |
| Հարթակի առավելագույն բարձրությունը | 13,8 մ |
| Մաքս.աշխատանքային շրջանակ | 8 մ |
| Ցանցի առավելագույն բարձրությունը | 7.03 մ |
| Թիվ 1 թեւի լաֆինգի շրջանակը | 0°~60° |
| Թիվ 2 թեւի լաֆինգի շրջանակը | -8°~75° |
| Բռնկաձև թևի լաֆինգի շրջանակը | -60°~80° |
| Պլատֆորմի ճոճանակի շրջանակը | 180° |
| Շեղման անկյուն | 355° |
| Պտտվող սեղանի պտտվող շառավիղը | 0,875 մ |
| Առավելագույն բեռնում | 227 կգ |
| Հետևի առավելագույն թեքություն | 0 մ |
| Կառավարման համակարգ | 12V DC համամասնական հսկողություն |
| Անվադող | 250-15 պինդ անվադող, ընտրովի 240/55 D17.5 |
| Հզորության պարամետրեր | |
| Սնուցման աղբյուր | 420 Ah/48 V DC |
| Էներգաբլոկ | 4 կվտ/48 Վ մշտական |
| Օժանդակ էներգաբլոկ | 2.2 կվտ/24 Վ մշտական |
| Աշխատող շարժիչ | 3.3 կվտ/32 Վ AC |
V. Մեքենայի անվտանգ աշխատանքային տիրույթի դիագրամ
Հավելված. կամընտիր կոնֆիգուրացիաներ
6.1 Բնապահպանական ամուր անվադող (անհետք)
6.2 Պլատֆորմի էլեկտրամատակարարում
Հիդրավլիկ գեներատորը կամ արտաքին սնուցման աղբյուրը միացված է այս հարթակին՝ օգտագործման համար:
Հոսանքի լարերի բնութագրերը՝ 4×4 մմ 2
Գնահատված հոսանք՝ 35A
6.3 Պլատֆորմի օդային խողովակ
Արտաքին օդի մատակարարումը խողովակով փոխանցվում է այս հարթակին օգտագործման համար:
Օդային խողովակի տրամագիծը՝ 8 մմ
6.4 Պլատֆորմի հակահարվածային փակագիծ
Ծալովի հակահարվածային սարքը պետք է պաշտպանի օպերատորին պլատֆորմի բարձրացման ժամանակ վերը նշված իրի վրա ազդեցությունից, ինչպես նաև կարող է ծալովի լինել՝ չզբաղեցնելով աշխատանքային տարածքը: